
01
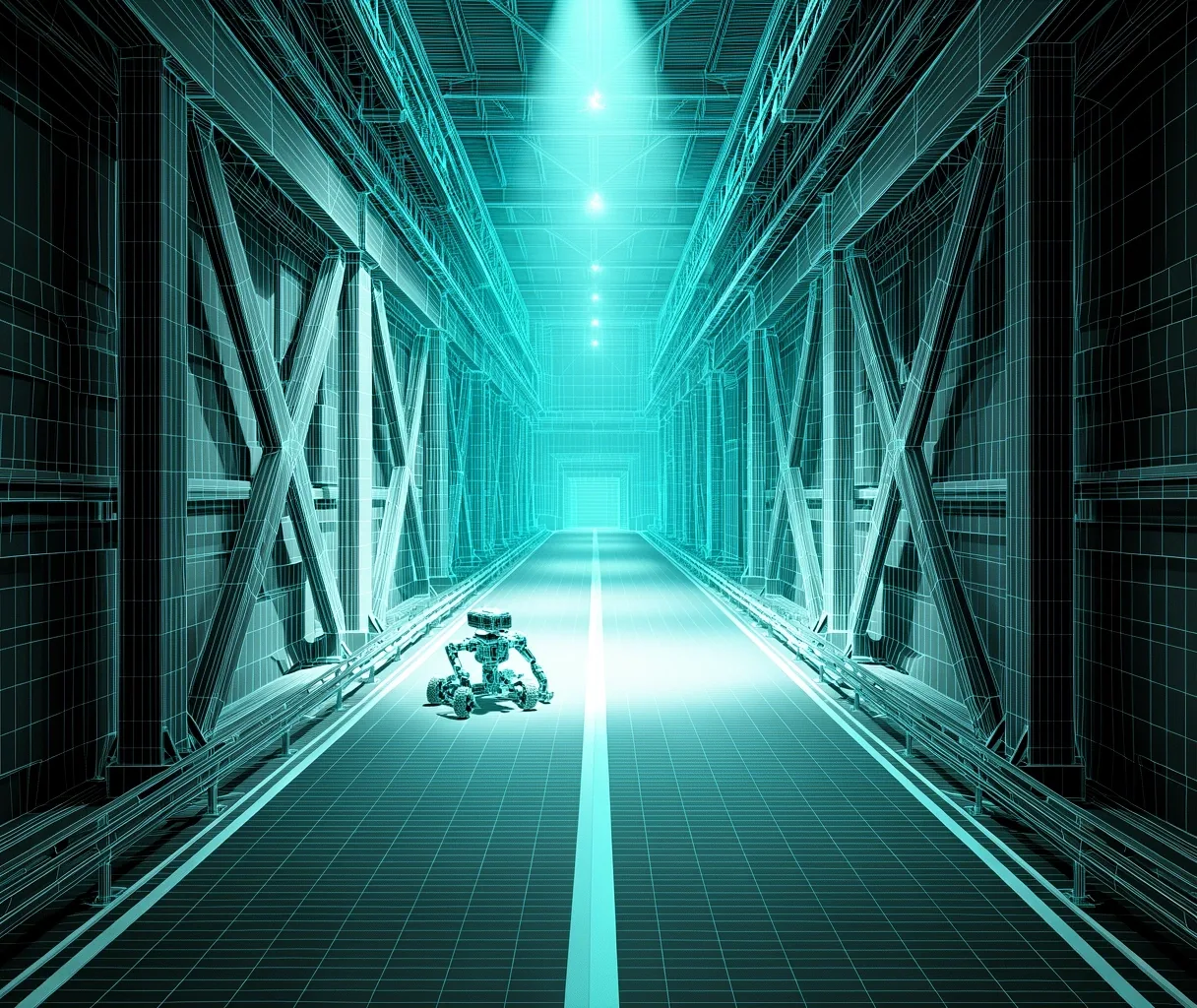
Environment Mapping & Constraint Design
Before a single line of training code is executed, we define the agent's observation space and operational boundaries. By mapping physical sensor specifications directly into the virtual reward framework, we prevent reward hacking and ensure the learning remains within safe operational limits.